Peter Hofbauer’s private Homepage
Selbstbauprojekte
eigene Entwicklungen


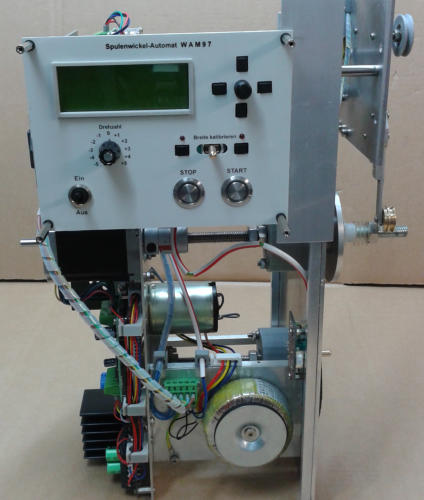
Spulen-Wickelmaschine, kompakt und transportabel (2/2)



Elektrischer Teil
Schaltplan, Übersicht
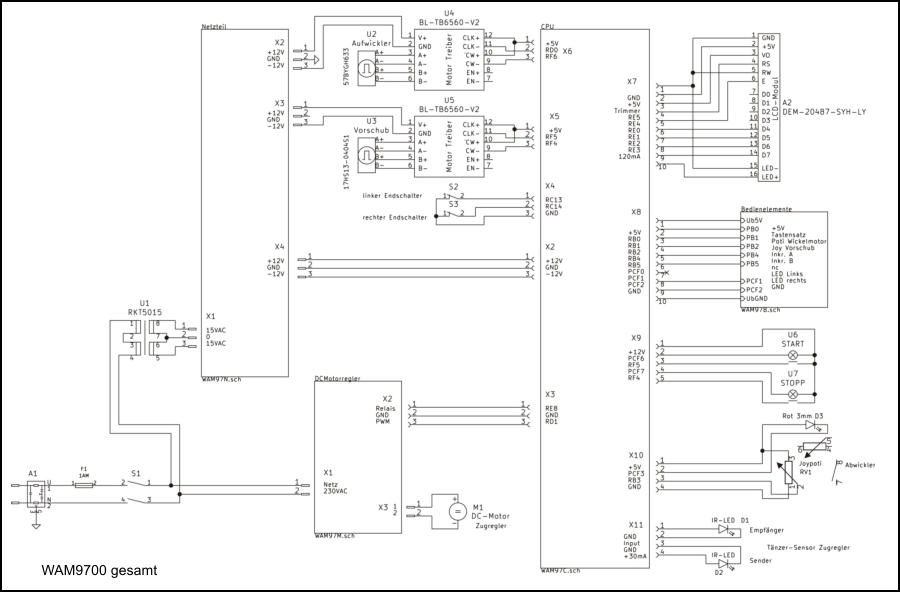
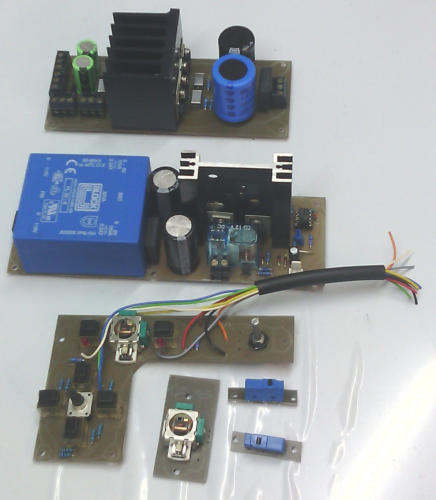
Der elektronische Teil besteht aus 4 Platinen:
•
WAM97C
CPU-Platine
•
WAM97B
Bedienelemente
•
WAM97N
Netzteil
•
WAM97M
4Q-Motorregler
Dazu kommen noch die 2 gekauften Treiber für die Schrittmotoren.
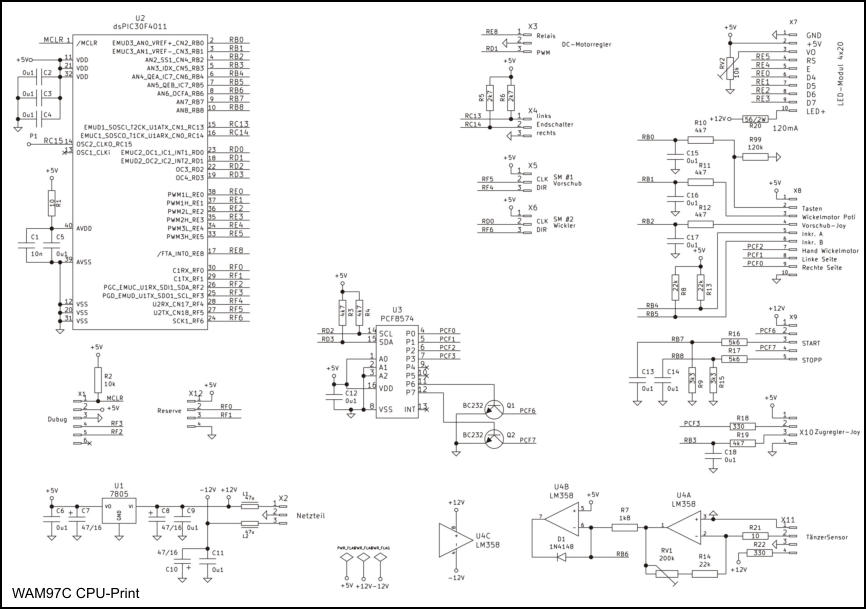
Die CPU-Platine
Die CPU-Platine arbeitet mit einen 16-bit Prozessor vom
Typ dsPIC30F4011.
Der 4Q-Motorregler wird mit nur 3 Leitungen über X3 direkt
angesteuert. An X4 liegen die zwei Endschalter (Schließer)
für den Vorschub.
X5 und X6 bedienen die zwei Schrittmotor-Treiber. Deren
Eingänge sind über Optokoppler potentialfrei.
An X7 ist das 4x20-LCD angeschlossen. Die
Bedienelement sind an X8, die START und STOP-Tasten
an X9 angeschlossen.
Die Ausgänge für die Signale (LEDs) werden mit den
PCF8574 ausgegeben. Auf der Frontplatte ist ein kleiner
Joystick zur manuellen Bedienung des Abwicklers. Dessen
Spannung kommt über X10/R19/C10 zur CPU.
Der Tänzersensor ist an X11. R22 ist der Vorwiderstand für
die Sende-IR-LED. Die IR-LED für den Empfang kommt
über R21 zum U4A. Dieser dient als Strom / Spannungs -
Wandler. Die Ausgangsspannung geht über R7 zur CPU.
U4B und D1 begrenzen diese Spannung auf 5V.
Die Bedienelemente-Platine
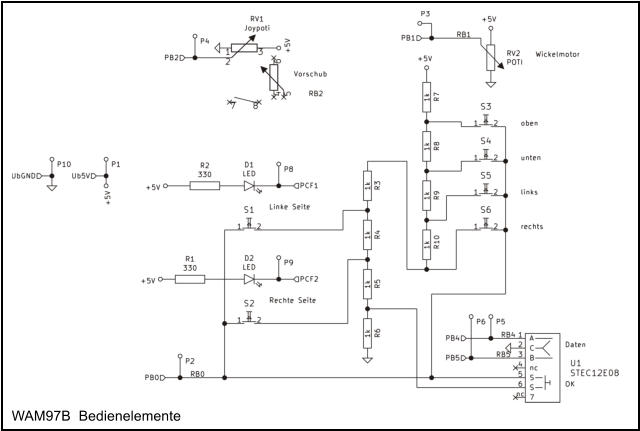
Diese Platine sitzt hinter der Front
der Steuerung.
Die 6 kleinen Tasten werden über
Widerstände kodiert von der CPU
analog eingelesen.
Ein kleiner Joystick PV1 steuert
manuell den Vorschub.
Mit Poti RV2 wird die Drehzahl des
Aufwicklers gewählt.
Mit den Inkrementalgeber U1 werden
die Daten editiert. Durch drücken auf
den Kopf wird Pin 5 und 6
verbunden. Das bewertet die CPU
als Enter-Taste.
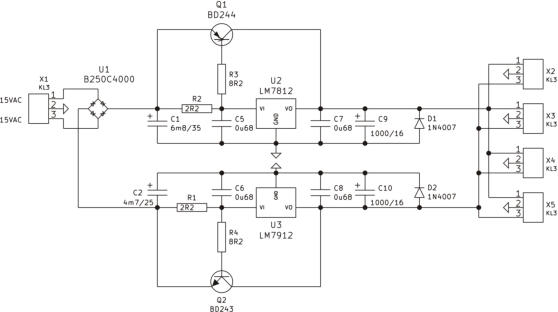
WAM97N Netzteil
Die Netzteil-Platine
Das Netzteil stabilisiert +/-12V für die
Steuerung und die zwei Schrittmotoren.
Diese werden von +12V nach -12V, also
mit 24V betrieben.
Weil die Stabis alleine zu wenig Strom
stabilisieren können, sind noch
Transitoren zur Unterstützung dazu
parallel.
Die Widerstände vor den Basen R3 und
R4 verhindern einen frühzeitigen Tod der
Transistoren bei Kurzschüssen.
Das funktioniert aber nicht als Dauer-
Kurzschluss-Schutz sondern nur
kurzzeitig.
Das Netzteil wird von einen Ringkerntrafo
mit 2 mal 15VAC versorgt
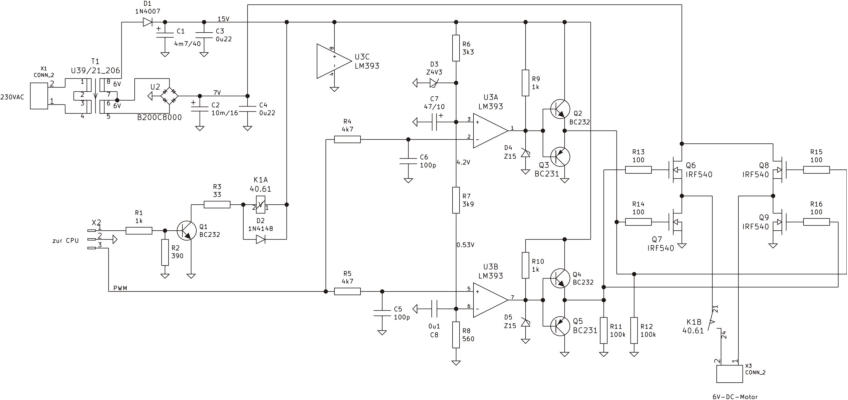
WAM97M Motorregler 4Q
Der 4Q-Motorregler
Wegen der Drahtzug-Regelung wird der Abwickler mit einen DC-Motor angetrieben. Damit so eine Regelung richtig funktionieren kann ist ein
Vier-Quadranten-Betrieb nötig.
Diese etwas seltsame Schaltung habe ich entwickelt weil ich einen 6V-Motor und einen Netztrafo mit 2 mal 6V im Lager hatte. Für den Motor
wird 7V und für die Steuerspannung von etwa 15V aufbereitet.
Der Motor ist ein Permanentmagnetläufer für eine nominale Spannung von nur 6V. Der Motor wird über ein Relais K1 an X3 angeschlossen.
Dieses Relais ist unbedingt nötig. Im Gegensatz zum Schrittmotor läuft ein DC-Motor sofort los wenn er Spannung bekommt.
Der Motor liegt in einer H-Brücke. Gebildet von vier IFR540. Extra Freilaufdioden sind unnötig, der IRF540 hat selber welche hat.
.
Die CPU steuert die H-Brücke direkt mit einer PWM von 26kHz. Wenn das Tastverhältnis 1:1 beträgt, steht der Motor. Verändert sich dieses
dreht der Motor in die entsprechenden Richtung.
Die PWM von der CPU wird mit RC-Glieder R4/C6 bzw R5/C5 mit einer leicht schrägen Flanke versehen. Die beiden Komparatoren U3A und
U3B vergleichen diese mit den verschieden hohen Spannungen am Gegenpol. Dadurch entsteht eine Totzeit damit nie alle VMOS
gleichzeitig schalten.
Die Gates der VMOS werden mit komplementären Transistoren Q2-Q5 niederohmig angesteuert. Die Steuerspannung für die VMOS
betragen 15V. Wegen der darunter liegenden Betriebsspannung von etwa 7V benötigt die H-Brücke keine P-Kanal-VMOS.
Eine Strombegrenzung für den Motor ist wegen der geringen Spannung und wegen des etwas weichen Netzteils nicht nötig.
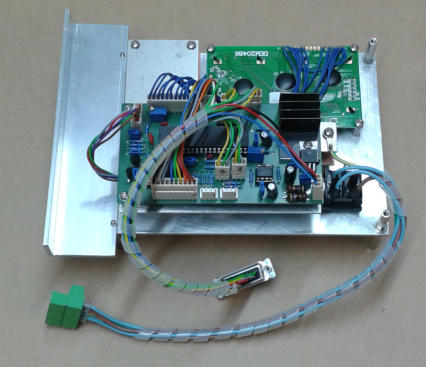
Die Steuerung sitzt an einer Seite im Gehäuse. Erst wenn die ganze
Mechanik im Gehäuse ist, kann die Steuerung angeschlossen und
verschraubt werden. Dann kann man aber nicht mehr sehen ob die
motorischen Bewegungen dadurch behindert werden.
Deshalb habe ich wie oben im Foto einen Winkel verwendet. Mit
diesen kann man die Steuerung an die Mechanik ohne Gehäuse
montieren. Um zu beobachten ob alles frei läuft.
Die Leitungen zur Mechanik habe ist mit einer 15 poligen D-Sub
Verbindung versehen. Sind aber nicht im Schaltplan eingezeichnet.
Steuerung komplett verdrahtet
Netzteil
4Q-Motorregler
Bedienelemente-
Platine
Endschalter
Joystick für Abwickler

Die Software
Die Software war etwas komplizierter als gedacht. Ich habe einige Zeit benötigt um einen guten Algorithmus für die Steuerung der beiden Schrittmotoren zu entwickeln. Die Schritte der beiden Schrittmotoren passen nie synchron zusammen. Die Steuerung darf auch nach 9999 Windungen keine Fehler aufsummieren. Die Anzahl der Windungen auf einer Lage sind nicht immer eine ganze Zahl. Die Software darf die Windungen nicht einfach abrunden, sonst rutschten die Drähte der folgende Lage in die untere Lage. Dann sind im ungünstigsten Fall die Spannungsdifferenz der nebeneinander liegenden Drähte zu hoch. Es ist mir gelungen einen Algorithmus zu entwickeln der perfekt funktioniert. Die maximal auftretenden Positionierfehler für den Vorschub beträgt über alle Windungen 2,5u. Die gesamte Anzahl der gewünschten Windungen ist eine ganze Zahl. In den einzelnen Lagen wird der Umfang einer Windung in 1600 Schritte unterteilt. Jede Lage wird in seiner ganzen Breite ausgenutzt. Bei diesen Projekt verwende ich eine andere Dateneingabe. Jede Ziffer kann getrennt editiert werden. Diese 4x20-LCDs sind für so eine Betriebsart eigentlich nicht vorgesehen. Mit einer entsprechen Software wird der Cursor festgehalten bis er durch Tasten verschoben wird. Die Steuerung des DC-Motors für den Zugregler war einfach nur mit einen P-Regler erledigt. Diese Regelung hat keinen Einfluss auf den sonstigen Vorgang. Daten der Software Programmiersprache: Assembler Source-Dateien: 21 Umfang: 6600 Zeilen incl. Programmteile: 11 in der Hauptschleife Durchlaufzeit: ca. 7us Prozessor: dsPIC30F4011Manöver-Kritik
Wie nach jeder neuen Konstruktion erkennt man einiges was man hätte besser lösen sollen. Bei dieser Konstruktion fällt mir nicht viel ein. Ein größeres Display? Das alte 4x20 LCD kann nicht alles was eigentlich von Nutzen wäre anzeigen. Mit den 4 Zeilen muss man viel Text und Daten weglassen. Die Bedienung auf der linken Seite geht eigentlich recht gut, aber besser wäre alles von vorn oder darüber. Allerdings war die wichtigste Bedingung der Einbau in ein kompaktes Gehäuse, geht also nicht.Nachbau
Wie fast alle meine Berichte ist auch dieser keine Bauanleitung. Das geht auch nicht weil ich bei den Teilen keine Lieferanten nennen kann. So ein Gehäuse zum Beispiel hat wohl keiner auf Lager. Ein paar Tipps: Die Steuerung funktioniert wenn folgende Einstellungen der beiden Schrittmotoren stimmen. Vorschub: 1/16 Schritt, pro Schritt muss sich der Vorschub um 2,5u (0,0025mm) bewegen. Aufwickler: 1/8 Schritt, also 1600 Schritte pro Umdrehung. Abwickler: DC-Motor mit möglichst hohen Drehmoment und geringer Drehzahl, besser mit Getriebe. Der kleine Schrittmotor für den Vorschub benötigt nicht viel Kraft. Der Treibe ist auf 0,3A, Stopp 50%, Decay 25% eingestellt. Der Schrittmotor für den Aufwickler ist bei meiner Maschine etwas geizig bemessen. Der Treiber ist auf 2,0A, Stopp 50%, Decay 100% eingestellt. Den Motor sollte man besser mit einer höheren Spannung und Leistung betreiben wenn man auch dickere Drähte mit der maximalen Drehzahl wickeln will. Die maximale Drehzahl von 370 Umdr/min kann nicht verändert werden. Der Zugregler hat keinen Einfluss auf die übrige Steuerung, kann also auch ganz entfallen. Die Lagerschalen aus den 3D-Drucker hatte ich mit ABS gedruckt. Die Maße waren genau richtig um die Lager einzuschrumpfen. Das ABS mit eine Heißluftpistole kurz angewärmt bis die Lager rein passen. Das funktionierte auch bei den Umlenkrollen. Die Download-Dateien: Die Schaltpläne sind mit KiCAD V5 gezeichnet. Der Gesamtschaltplan (WAM9700) enthält alle Schaltpläne ohne die Layouts. Die anderen Schaltpläne (WAM97B,..M,..N) sind mit denen im Gesamtplan identisch, aber mit Layouts. Jeweils mit eigene Projektdatei. Die CPU-Platine wurde extern angefertigt, die 3 anderen habe ich auf der Portalfräse im Voronoi-Verfahren selber angefertigt. Diese Layouts müssen, wenn ohne Voronoi gearbeitet wird, wegen der Leiterbahnbreite vielleicht überarbeitet werden. Die mechanischen Zeichnungen sind 1:1 im Dxf-Format. Weil ich die Bleche auf der Portalfräse mache, fehlen die Bemaßungen. Die sind aber leicht nachträglich anzubringen. Zum Beispiel mit QCAD oder den kostenlosen 2D-CAD “LibrCAD”. Die Teile für den 3D-Drucker sind im Stl-Format im Download vorhanden.